|
|
|
Linearisierung eines Motormodells |
|
| BigBodyBugatti |

Forum-Anfänger
|
 |
Beiträge: 11
|
|
|
|
Anmeldedatum: 25.11.15
|
|
|
|
Wohnort: ---
|
|
|
|
Version: ---
|
|
|
|
 |
|
 Verfasst am: 26.01.2016, 12:20
Titel: Linearisierung eines Motormodells
Verfasst am: 26.01.2016, 12:20
Titel: Linearisierung eines Motormodells
|
 |
Hallo,
ich habe die Aufgabe bekommen, ein bereits vorhandenes Motormodell zu linearisieren und anschließend zu regeln. Das Modell ist strak vereinfacht, jedoch habe ich praktishc keine Erfahrung mit Linearisierung und bräuchte etwas Hilfe.
Für den Anfang möchte ich das Modell um den Leerlauf linearisieren. D.h. die Eingangsgrößen sind alle konstant: Lastmoment = Null, Kraftstoffmenge = konstant und der Zeitpunkt der Kraftstoffeinspritzung = konstant. Die Ausgangsgröße (Drehzahl) soll 1000 U/min sein.
In dem Modell spielt allerdings u.a. der Kolbenwinkel phi und der Weg des Kolbens s eine große Rolle. Erst bei einem bestimmten Winkel wird der Kraftsotff gezündet und es entsteht Leistung. Selbst wenn alle Eingänge konstant sind, wird s einen sinus-förmigen Verlauf haben und phi wie eine Sägezahnfunktion aussehen. Wie kann ich diese Problem umgehen?
|
|
|
|
|
|
| BigBodyBugatti |
Themenstarter
Forum-Anfänger
|
|
Beiträge: 11
|
|
|
|
Anmeldedatum: 25.11.15
|
|
|
|
Wohnort: ---
|
|
|
|
Version: ---
|
|
|
|
|
|
|
Verfasst am: 26.01.2016, 16:38
Titel:
|
|
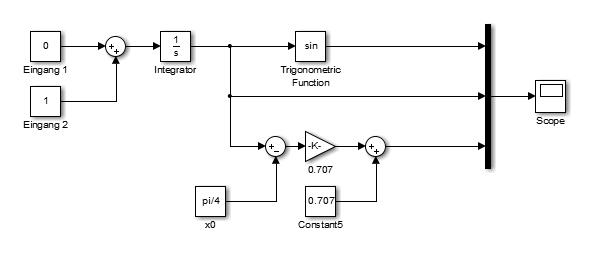
Also im wesentlichen lässt sich das Problem auf dieses Biespiel reduzieren:

Natürlich kann man den Sinus an einem Arbeitspunkt linearisieren, aber durch den Integrator ändert sich der Punkt ja ständig. Kann ich trotzdem linearisieren?
|
|
|
|
| Friidayy |

Forum-Century
|
|
Beiträge: 225
|
|
|
|
Anmeldedatum: 17.12.13
|
|
|
|
Wohnort: ---
|
|
|
|
Version: R2012b
|
|
|
|
|
|
|
Verfasst am: 26.01.2016, 18:01
Titel:
|
|
Wie lautet deine Differentialgleichung?
Gruß
|
|
|
|
| BigBodyBugatti |
Themenstarter
Forum-Anfänger
|
|
Beiträge: 11
|
|
|
|
Anmeldedatum: 25.11.15
|
|
|
|
Wohnort: ---
|
|
|
|
Version: ---
|
|
|
|
|
|
|
Verfasst am: 26.01.2016, 23:29
Titel:
|
|
Zu dem Motormodell gibt es keine DGL. Es ist zwar stark vereinfacht aber immer noch viel zu umfangreich um es in eine DGL zusammenzufassen. Zum Teil kommen auch Kennlinen vor, aus denen Matlab dann Werte abließt.
Mir wäre aber schon geholfen, wenn mir jemand sagen könnte, ob sich das gezeichnete System linearisieren lassen kann (bzw wenn mir jemand bestätigt, dass es nicht geht)
|
|
|
|
| Friidayy |
Forum-Century
|
|
Beiträge: 225
|
|
|
|
Anmeldedatum: 17.12.13
|
|
|
|
Wohnort: ---
|
|
|
|
Version: R2012b
|
|
|
|
|
|
|
Verfasst am: 27.01.2016, 00:14
Titel:
|
|
| BigBodyBugatti hat Folgendes geschrieben: |
Natürlich kann man den Sinus an einem Arbeitspunkt linearisieren, aber durch den Integrator ändert sich der Punkt ja ständig. Kann ich trotzdem linearisieren? |
Das ist ja gerade das Problem bei einer Linearisierung, du bekommst halt nur brauchbare Ergebnisse, wenn du dich im Betriebspunkt aufhälst.
|
|
|
|
| BigBodyBugatti |
Themenstarter
Forum-Anfänger
|
|
Beiträge: 11
|
|
|
|
Anmeldedatum: 25.11.15
|
|
|
|
Wohnort: ---
|
|
|
|
Version: ---
|
|
|
|
|
|
|
Verfasst am: 27.01.2016, 12:10
Titel:
|
|
Aber für das gezeigt Beispiel gibt es doch gar keinen Betriebspunkt oder? Der Wert des Ausgangs ist ja nicht nur vom Input, sondern auch von der Zeit abhängig (wegen dem Integrator). Man könnte das System also nur zu einem bestimmtem Zeitpunkt linearisieren oder?

|
|
|
|
| @Johannes |
Gast
|
|
Beiträge: ---
|
|
|
|
Anmeldedatum: ---
|
|
|
|
Wohnort: ---
|
|
|
|
Version: ---
|
|
|
|
|
|
|
Verfasst am: 27.01.2016, 14:11
Titel:
|
|
Du kannst sin(x) in jedem beliebigen Arbeitspunkt x0 linearisieren. Diese Linearisierung ist dann für kleine Abweichungen um den Arbeitspunkt gültig. Da sich dein Arbeitspunkt aber ständig ändert müsstest du auch immer wieder die Linearisierung des Sinus updaten.
Wie sieht deine Regelstrecke aus? Kannst du ein Modell posten damit man verstehen kann wie das ganze zusammenhängt?
Grüße,
Johannes
|
|
|
|
| Friidayy |
Forum-Century
|
|
Beiträge: 225
|
|
|
|
Anmeldedatum: 17.12.13
|
|
|
|
Wohnort: ---
|
|
|
|
Version: R2012b
|
|
|
|
|
|
|
Verfasst am: 27.01.2016, 14:44
Titel:
|
|
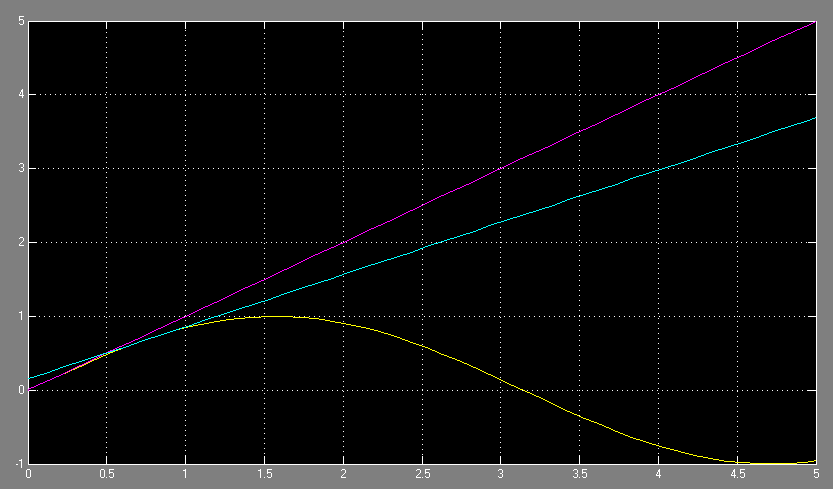
Hier 2 Linearisierungen für x0=0 und x0=pi/4. Ja, in deinem Fall hängt der Betriebspunkt mit der Zeit zusammen. Die Formel für die Linearisierung des Sinus findest du hier https://de.wikipedia.org/wiki/Linearisierung
Gruß
|
|
|
|
| BigBodyBugatti |
Themenstarter
Forum-Anfänger
|
|
Beiträge: 11
|
|
|
|
Anmeldedatum: 25.11.15
|
|
|
|
Wohnort: ---
|
|
|
|
Version: ---
|
|
|
|
|
|
|
Verfasst am: 27.01.2016, 16:13
Titel:
|
|
Erstmal vielen Dank für eure Hilfe friidayy und Johannes. Ich kann leider kein Model posten da das Modell teilweise mit Messwerten von echten Motoren arbeitet. Ich mache gerade ein Praktikum bei einem Motorenhersteller und mein Betreuer hat leider nciht allzu viel Zeit für mich. Aber ich hoffe das er mir bald weiter helfen kann.
Ich glaube auch, dass es ohne Modell kaum möglich ist mir zu helfen. Wenn ich noch irgendetwas finde, meld ich mich.
|
|
|
|


|
|
|
Einstellungen und Berechtigungen
|
|
Du kannst Beiträge in dieses Forum schreiben.
Du kannst auf Beiträge in diesem Forum antworten.
Du kannst deine Beiträge in diesem Forum nicht bearbeiten.
Du kannst deine Beiträge in diesem Forum nicht löschen.
Du kannst an Umfragen in diesem Forum nicht mitmachen.
Du kannst Dateien in diesem Forum posten
Du kannst Dateien in diesem Forum herunterladen
|
|
Impressum
| Nutzungsbedingungen
| Datenschutz
| FAQ
|  RSS RSS
Hosted by:

Copyright © 2007 - 2026
goMatlab.de | Dies ist keine offizielle Website der Firma The Mathworks
MATLAB, Simulink, Stateflow, Handle Graphics, Real-Time Workshop, SimBiology, SimHydraulics, SimEvents, and xPC TargetBox are registered trademarks and The MathWorks, the L-shaped membrane logo, and Embedded MATLAB are trademarks of The MathWorks, Inc.
|
|



