ich arbeite gerade an der analyse von PointClouds (PC) aus Lidar Daten. Leider war der Lidar nicht 100% im Wasser montiert, bzw dadurch das der Lidar für die Messungen auf einem Traktor montiert wurde und der auf dem Acker auch ein wenig hin und her wackelt, hab ich in meinen Daten immer einen leichten Neigungswinkel entlang der X-Achse, der dooferweise von PC zu PC unterschiedlich ist.
Ich weiß wie man diesen Winkel über eine Rotationsmatrix korrigieren kann, aber da ich mehrere 1000 PC's analysieren muss, suche ich nach einer automatisierten Lösung. Dabei bin ich auf "pcfitplane" gestoßen, weil man hier mit einem Referenzvektor arbeiten kann. Was ich nun machen möchte ist die vorhandene PC an den Referenzvektor anpassen, der entlang der X-Achse geht und keinen Winkel hat bzw. immer den gleichen Z-Wert.
Allerdings verstehe ich die offizielle Beschreibung ( https://de.mathworks.com/help/vision/ref/pcfitplane.html#bus0jhx ) nicht richtig oder bin mit pcfitplane ganz auf dem Holzweg, aber wie es aussieht kann ich mit pcfitplane nur gewisse ebenen aus der PC heraus schneiden? Irgenwie komme ich gerade nicht weiter und hoffe hier hat jemand einen Rat!
Es wäre hilfreich, wenn Du direkt angibst, welche Daten Du zur Verfügung hast. Vielleicht eine Matrix mit Z-Werten zu bestimmten X und Y Koordinaten? Dann könnte man leicht die Rotation finden, die eine durch diese Punkte gefittete Ebene parallel zum Boden kippt.
"Vielleicht eine Matrix mit Z-Werten zu bestimmten X und Y Koordinaten? Dann könnte man leicht die Rotation finden, die eine durch diese Punkte gefittete Ebene parallel zum Boden kippt.?"
Genau so verhält es sich. Wäre super wenn du mir sagen könntest wie man das macht.
Das hört sich nach einer Fragestellung an, die im Zweifel der MathWorks Support oder ein Applikationsingenieur beantworten können sollte. So hilfreich Communities sind, so wenig ist garantiert, dass man eine Antwort bekommt.
Mir ist immer noch nicht klar, welche Inputs Du genau hast. Eigentlich ist das Fitten einer Eben z.B. per SVD nicht schwierig. Wenn Du dann den Normalen-Vektor der Ebene hast, kannst Du die Rotationsachse bestimmen (senkrecht auf Z und der Normalen) und den Winkel.
Aber wie gesagt, mir sind Inputzs und das gewünschte Output noch nicht klar.
mein Input ist eine Mx3 Matrix. Erste Spalte enstpricht den X-Werten, zweite Spalte den Y-Werten und die dritte Spalte den Z-Werten.
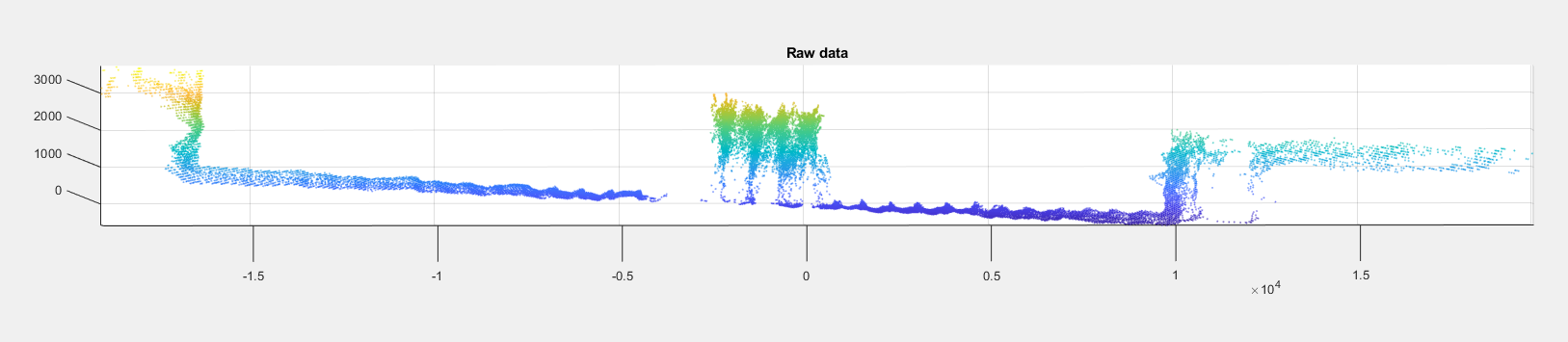
Ich hab mal ein Bild angehängt mit der Seitenansicht einer Punktewolke, mit denen ich gerade arbeite. Die horizontale Achse entspricht den X-Werten und die vertikale Achse den Z-Werten.
Wie du siehst hab ich entlang der horizontalen Achse einen Winkel drin und diesen Winkel möchte ich bestimmen und die Punktewolke auch um diesen Winkel drehen. Letzteres weiß ich wie das funktioniert, nur wie man den Winkel ausliest weiß ich nicht.
Zunächst hat der Code bei mir nicht richtig funktioniert, wenn ich ihn auf meine Rohdaten angewendet habe. Warum auch immer hat er dann einen falschen Winkel ausgelesen und auch in die falsche Richtung gedreht.
Der Code funktioniert aber wunderbar, wenn man ihn auf eine Ebene anwendet, die man aus der ursprünglichen Point Cloud extrahiert hat.
Das hab ich mit pcfitplane gemacht. In meinem Fall sieht der Code so aus:
Du kannst Beiträge in dieses Forum schreiben. Du kannst auf Beiträge in diesem Forum antworten. Du kannst deine Beiträge in diesem Forum nicht bearbeiten. Du kannst deine Beiträge in diesem Forum nicht löschen. Du kannst an Umfragen in diesem Forum nicht mitmachen. Du kannst Dateien in diesem Forum posten Du kannst Dateien in diesem Forum herunterladen
MATLAB, Simulink, Stateflow, Handle Graphics, Real-Time Workshop, SimBiology, SimHydraulics, SimEvents, and xPC TargetBox are registered trademarks and The MathWorks, the L-shaped membrane logo, and Embedded MATLAB are trademarks of The MathWorks, Inc.











 RSS
RSS