|
|
|
Drehmomentregelung über Erregerkreis beim DC-Motor |
|
| Romik79 |

Forum-Anfänger
|
 |
Beiträge: 21
|
|
|
|
Anmeldedatum: 06.08.14
|
|
|
|
Wohnort: Dortmund
|
|
|
|
Version: ---
|
|
|
|
 |
|
 Verfasst am: 06.08.2014, 21:40
Titel: Drehmomentregelung über Erregerkreis beim DC-Motor
Verfasst am: 06.08.2014, 21:40
Titel: Drehmomentregelung über Erregerkreis beim DC-Motor
|
 |
Hallo!
ich arbeite an einem Projekt. Dort muss ich eine Drehmomentregelung (über Erregerspannung)für einen fremderregten Gleichstrommotor entwickeln. Ich habe zuerst versucht eine Regelstrecke selber auf zu stellen, was mir auch so einigermaßen gelang. Aber das zu regeln hab ich nicht geschafft.
Dann habe ich in Simulink ne tolle Sachen wie Simscape entdeckt. Dort habe ich einen fertigen Motor (DC-Machine) gefunden, mit dem ich versuche meine Regelung aufzubauen.
Hier ist das Schaltbild:
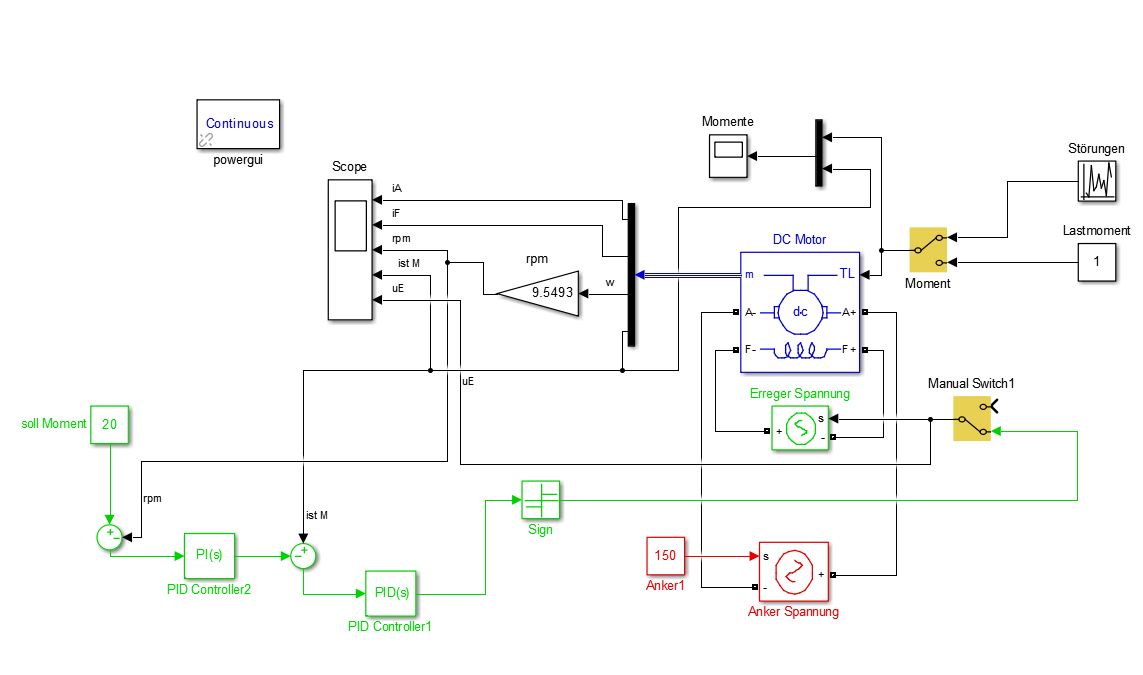
Dieser Regler regelt das Drehmoment nicht. Er hält die Erregerspannung einfach klein und reagiert nicht auf das Eingangssignal (Solldrehmoment).
Was mach ich falsch? Die Simulink-Datei habe ich angehängt.
Danke
| Beschreibung: |
|

Download |
| Dateiname: |
DC_Motor_mit_PID.slx |
| Dateigröße: |
22.61 KB |
| Heruntergeladen: |
1123 mal |
| Beschreibung: |
|
Download |
| Dateiname: |
DC-motor mit Regelung.JPG |
| Dateigröße: |
66.78 KB |
| Heruntergeladen: |
1249 mal |
|
|
|
|
|
|
| Epfi |

Forum-Meister

|
|
Beiträge: 1.134
|
|
|
|
Anmeldedatum: 08.01.09
|
|
|
|
Wohnort: ---
|
|
|
|
Version: ---
|
|
|
|
|
|
|
Verfasst am: 06.08.2014, 22:24
Titel:
|
|
Ist Dir aufgefallen, dass Du eine Drehzahlregelung mit unterlagerter Drehmomentregelung gebaut hast?
Vermutlich tut Dein Regler genau das, was Du ihm sagst: die Drehzahl konstant halten, wofür Du ein Drehmoment von 1Nm (Lastmoment) benötigst. Das sollte der Drehzahlregler einstellen und dann halten.
|
|
|
|
| Romik79 |
Themenstarter
Forum-Anfänger
|
|
Beiträge: 21
|
|
|
|
Anmeldedatum: 06.08.14
|
|
|
|
Wohnort: Dortmund
|
|
|
|
Version: ---
|
|
|
|
|
|
|
Verfasst am: 06.08.2014, 23:01
Titel:
|
|
OK, hab die Signale getauscht.
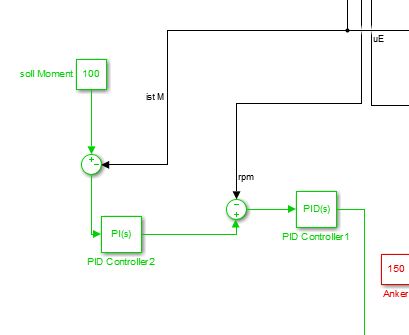
Jetzt fährt er die Erregerspannung bis zur einer 7 Stelliger Zahl hoch. Aber das Drehmoment (Ich habe Msoll auf 7 und Lastmoment auf 2 eingestellt) bleibt bei 2. Hier das Scope:

Als ob die Erregerspannung keinen Einfluss auf das Drehmoment hat.
Was stimmt nicht? 
| Beschreibung: |
|
Download |
| Dateiname: |
scope.JPG |
| Dateigröße: |
102.87 KB |
| Heruntergeladen: |
1189 mal |
| Beschreibung: |
|
Download |
| Dateiname: |
ddd.JPG |
| Dateigröße: |
18.01 KB |
| Heruntergeladen: |
1171 mal |
|
|
|
|
| Epfi |
Forum-Meister
|
|
Beiträge: 1.134
|
|
|
|
Anmeldedatum: 08.01.09
|
|
|
|
Wohnort: ---
|
|
|
|
Version: ---
|
|
|
|
|
|
|
Verfasst am: 06.08.2014, 23:06
Titel:
|
|
Naja... ne Drehmomentregelung mit unterlagertem Drehzahlregler erscheint mir so direkt auch nicht sonderlich sinnvoll. Wenn Du nur das Drehmoment regeln willst, brauchst Du nur einen Regler. Der arbeitet dann völlig unabhängig von der Drehzahl.
Auch wenn man bei so einer Regelung aufpassen sollte, dass man die Erregerspannung nicht zu klein macht, da die Maschine sonst durchgeht. Aber das sind dann Details, wenn es grundsätzlich funktioniert.
|
|
|
|
| Romik79 |
Themenstarter
Forum-Anfänger
|
|
Beiträge: 21
|
|
|
|
Anmeldedatum: 06.08.14
|
|
|
|
Wohnort: Dortmund
|
|
|
|
Version: ---
|
|
|
|
|
|
|
Verfasst am: 06.08.2014, 23:21
Titel:
|
|
ja, ich habe bereits nur mit M-Regler ausprobiert.
Das kommt dabei raus:
der fährt weiterhin Ue hoch und M bleibt bei 2
| Beschreibung: |
|
Download |
| Dateiname: |
scope.JPG |
| Dateigröße: |
127.27 KB |
| Heruntergeladen: |
1144 mal |
|
|
|
|
| Romik79 |
Themenstarter
Forum-Anfänger
|
|
Beiträge: 21
|
|
|
|
Anmeldedatum: 06.08.14
|
|
|
|
Wohnort: Dortmund
|
|
|
|
Version: ---
|
|
|
|
|
|
|
Verfasst am: 06.08.2014, 23:22
Titel:
|
|
|
lade doch mal Bitte die Simulink-Datei aus dem obersten Beitrag runter und versuch mal das zu realisieren. Ich bin kurz vor Verzweiflung
|
|
|
|
| Epfi |
Forum-Meister
|
|
Beiträge: 1.134
|
|
|
|
Anmeldedatum: 08.01.09
|
|
|
|
Wohnort: ---
|
|
|
|
Version: ---
|
|
|
|
|
|
|
Verfasst am: 07.08.2014, 09:50
Titel:
|
|
Ich kann die Datei zwar runterladen, aber das wird nicht viel bringen, da mir die Lizenzen fehlen und Du ja auch schon wieder an dem Modell rumgebastelt hast...
Hast Du das Maschinenmodell mal einfach nur mit konstanter Erreger- und Ankerspannung betrieben und geschaut, ob das funktioniert? Ich verstehe nicht so recht, warum der Ankerstrom null wird.
|
|
|
|
| Romik79 |
Themenstarter
Forum-Anfänger
|
|
Beiträge: 21
|
|
|
|
Anmeldedatum: 06.08.14
|
|
|
|
Wohnort: Dortmund
|
|
|
|
Version: ---
|
|
|
|
|
|
|
Verfasst am: 07.08.2014, 14:44
Titel:
|
|
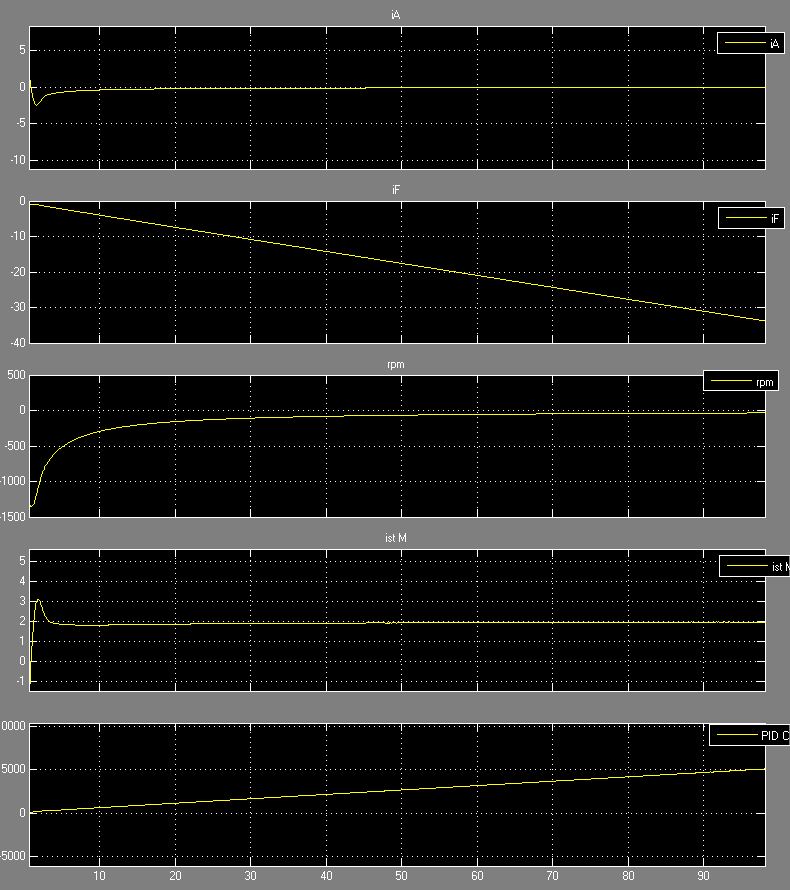
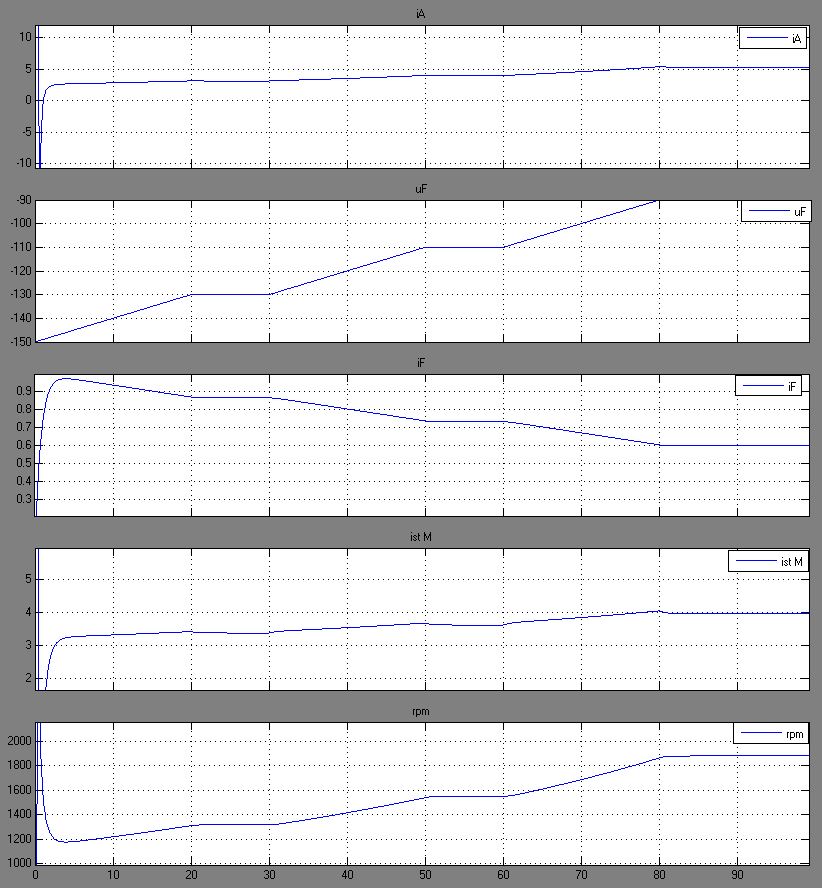
dass die Erregerspannung Einfluss auf das Drehmoment hat, sieht man hier, indem ich die Erregerspannung von 150V langsam auf 90 fahre.
| Beschreibung: |
|
Download |
| Dateiname: |
scope2.JPG |
| Dateigröße: |
144.03 KB |
| Heruntergeladen: |
1158 mal |
| Beschreibung: |
|
Download |
| Dateiname: |
scope.JPG |
| Dateigröße: |
150.71 KB |
| Heruntergeladen: |
1170 mal |
|
|
|
|
| Epfi |
Forum-Meister
|
|
Beiträge: 1.134
|
|
|
|
Anmeldedatum: 08.01.09
|
|
|
|
Wohnort: ---
|
|
|
|
Version: ---
|
|
|
|
|
|
|
Verfasst am: 07.08.2014, 14:58
Titel:
|
|
Und in diesen Simulationen wird die Drehzahl auch nicht null, das ist doch schon mal gut. Aber dass da ein Moment ungleich null aus der Maschine kommt und sie dabei nicht beschleunigt haut nicht hin (z.B. bei 80...90s). Oder hast Du ein gleich großes Lastmoment dran hängen bzw. noch eine Drehzahlregelung irgendwo? Was ist das denn für ein Moment, was Du da misst?
Und vielleicht willst Du die drei, vier Gleichungen doch lieber selbst in Simulink zusammenbauen. So lange da keine Halbleiter vorkommen, ist das doch eigentlich recht einfach und schnell gemacht und man versteht hinterher zumindest, was man da vor sich hat und warum es das tut, was es tut...
|
|
|
|
| Romik79 |
Themenstarter
Forum-Anfänger
|
|
Beiträge: 21
|
|
|
|
Anmeldedatum: 06.08.14
|
|
|
|
Wohnort: Dortmund
|
|
|
|
Version: ---
|
|
|
|
|
|
|
Verfasst am: 07.08.2014, 23:14
Titel:
|
|
| |
 |
 |
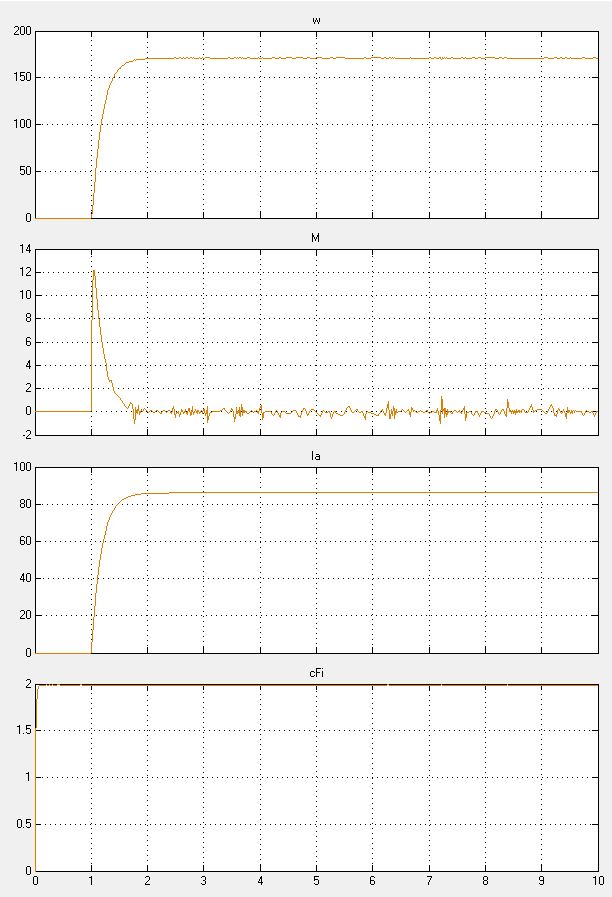
Ich habe hier ein Signalflussplan der fremderregten GSM erstellt.
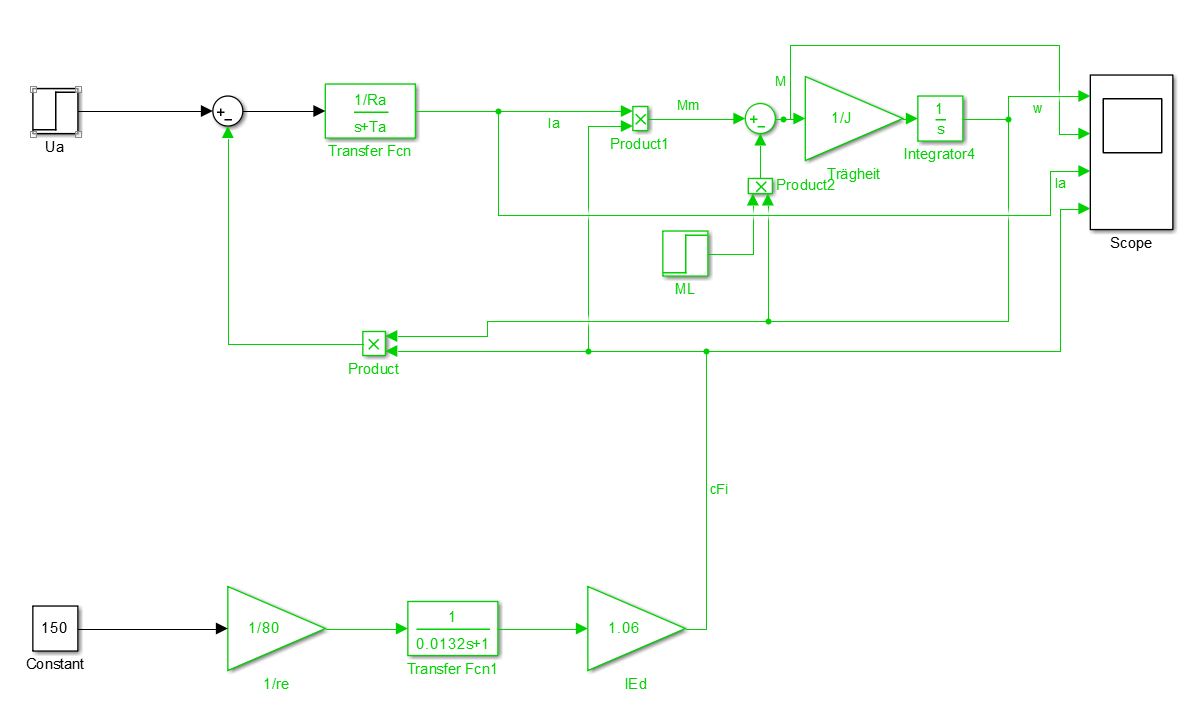
Aber ich habe da einige Schwierigkeiten mit der Parametrierung.
Zum Beispiel habe ich einen Startsprung einer realen Maschine aufgenommen:
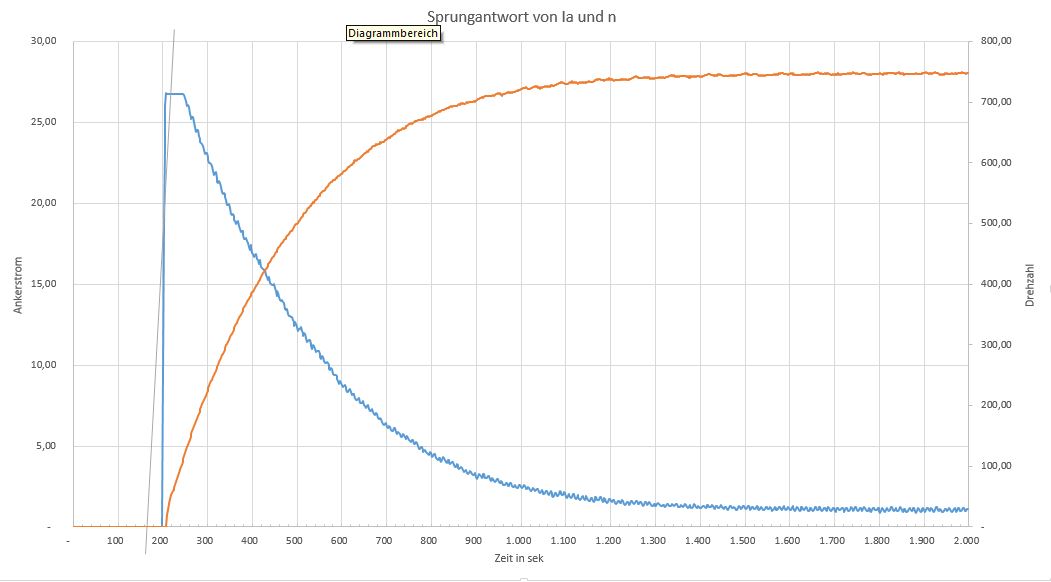
Deren Daten hier sind:
Hersteller AEG
Ra= 1.86 Ohm
Re= 80.2 Ohm
La= 1.1 H
Le= 1.06 H
P= 5,5 kW
Ua= 125V
Ue= 100V
An der Welle hängt noch eine gleiche GSM, die ich später zur Last nutze. Daher kann das Trägkeitsmoment etwas größer erscheinen.
Und wenn ich die Daten dort eingebe, kommt bei mir das raus:
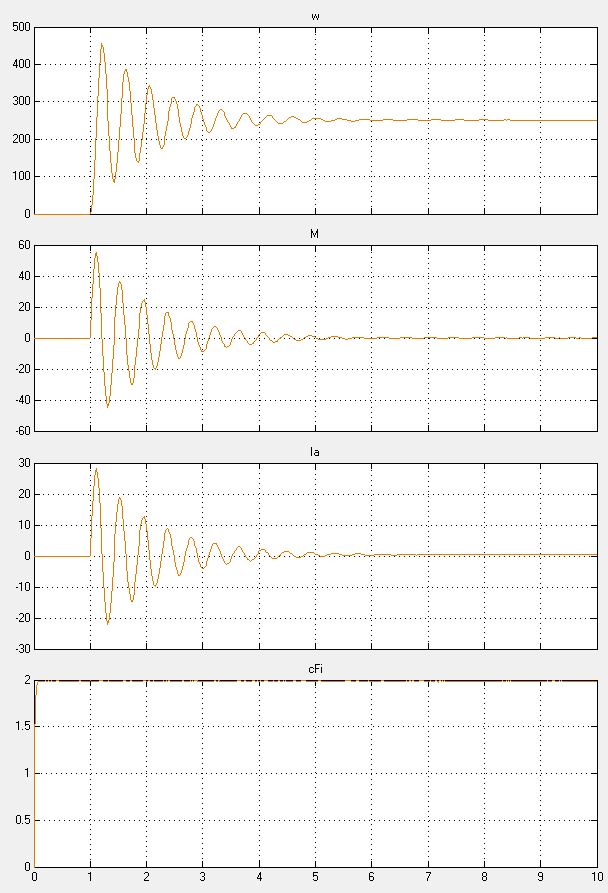
P.S. Daner für die Mail. Ja, ich habe schon viele Modelle von den Gleichstrommaschinen im Internet gefunden. Die meisten waren aber ohne Erregerspannung, also konstanter Fluß.
| Beschreibung: |
|
Download |
| Dateiname: |
sprung scope.JPG |
| Dateigröße: |
99.06 KB |
| Heruntergeladen: |
1192 mal |
| Beschreibung: |
|
Download |
| Dateiname: |
dc-motor.JPG |
| Dateigröße: |
57.42 KB |
| Heruntergeladen: |
1124 mal |
| Beschreibung: |
|
Download |
| Dateiname: |
Sprung AEG Motor.JPG |
| Dateigröße: |
59.67 KB |
| Heruntergeladen: |
1156 mal |
|
|
|
|
| Epfi |
Forum-Meister
|
|
Beiträge: 1.134
|
|
|
|
Anmeldedatum: 08.01.09
|
|
|
|
Wohnort: ---
|
|
|
|
Version: ---
|
|
|
|
|
|
|
Verfasst am: 08.08.2014, 08:41
Titel:
|
|
Vielleicht willst Du Dein Lastmoment (Step-Block "ML") nicht mit omega multiplizieren? So, wie es jetzt ist, hast Du in der Mechanik noch eine zeitabhängige viskose Dämpfung eingebaut...
Was macht die Maschine denn bei ML=const.=0 und einem Sprung in der Ankerspannung?
|
|
|
|
| Romik79 |
Themenstarter
Forum-Anfänger
|
|
Beiträge: 21
|
|
|
|
Anmeldedatum: 06.08.14
|
|
|
|
Wohnort: Dortmund
|
|
|
|
Version: ---
|
|
|
|
|
|
|
Verfasst am: 08.08.2014, 13:59
Titel:
|
|
genau das Selbe:
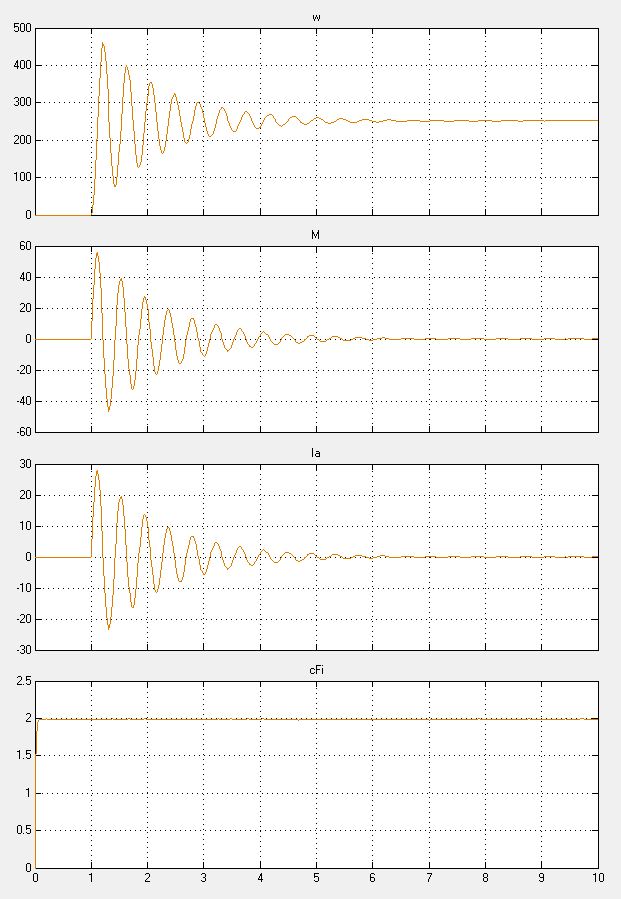
Übrigens: Was hälst du von dem Erregerkreis-Modell? Ich habe es aus dem Buch vom Schröder "Elek. Antriebe" nach gebaut hier:
ist das richtig? Ich bin mir nicht sicher.
Und dass es so schwingt ist doch auch total falsch! Es stimmt was mit meinem Modell nicht.
| Zitat: |
| So, wie es jetzt ist, hast Du in der Mechanik noch eine zeitabhängige viskose Dämpfung eingebaut... |
wo soll ich da was eingebaut haben???
Edit: Ich habe mal das ML von 0.03 auf 1 erhöht (mit omega weiterhin multipliziert) und habe stabile Ergebnisse! Allerdings nicht 100% richtige
| Beschreibung: |
|
Download |
| Dateiname: |
scope2.JPG |
| Dateigröße: |
96 KB |
| Heruntergeladen: |
1245 mal |
| Beschreibung: |
|
Download |
| Dateiname: |
buch.JPG |
| Dateigröße: |
33.65 KB |
| Heruntergeladen: |
1171 mal |
| Beschreibung: |
|
Download |
| Dateiname: |
scope.JPG |
| Dateigröße: |
101.69 KB |
| Heruntergeladen: |
1163 mal |
|
|
|
|
| Epfi |
Forum-Meister
|
|
Beiträge: 1.134
|
|
|
|
Anmeldedatum: 08.01.09
|
|
|
|
Wohnort: ---
|
|
|
|
Version: ---
|
|
|
|
|
|
|
Verfasst am: 09.08.2014, 20:31
Titel:
|
|
| |
|
|
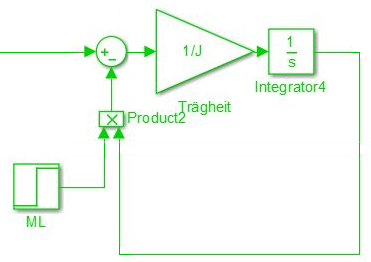
Es ist natürlich kein Wunder, dass es weniger schwingt, wenn Du die Dämpfung größer machst :) Ich habe das PT1-Glied, das Du gebastelt hast mal herausgegriffen und isoliert aufgemalt:
Wenn Du es genau anguckst, entdeckst Du, dass es das gleiche ist, wie ich hier aufgemalt habe: http://www.gomatlab.de/bei-transfer.....aendern-t11816.html#42374
Du koppelst die Drehzahl mit einem Faktor negativ auf den Integrator zurück. Das nennt man viskose Reibung oder Dämpfung. Und damit ist das, was Du für Dein Lastmoment vorgibst kein konstantes Lastmoment sondern Drehzahlabhängig. Wenn Du das Lastmoment an Deinem Teststand nicht auch so vorgibst, ist es nicht weiter verwunderlich, dass da nicht das gleiche rauskommt, wie in Deiner Simulation.
Dass Dein System für kleine Dämpfungsfaktoren (in Deiner Simulation etwas irreführend mit "Lastmoment" bezeichnet) schwingt, kann gut sein. Wenn man Systeme ohne Reibung und Dämpfung modelliert, ist das nicht verwunderlich. Dass es nicht mehr schwingt, wenn Du das "Lastmoment" größer macht liegt daran, dass Du mit größerem "Lastmoment" die Dämpfung vergrößerst. Und je mehr Dämpfung man hat, desto weniger schwingt das System.
Mach doch mal die Rückführung der Drehzahl über einen konstanten Faktor (z.b. 0.3) und zieh das Lastmoment ohne Multiplikationsstelle von Deinem Luftspaltmoment ab. Dann sollte es nicht schwingen und Du hast ein sauber modelliertes Lastmoment.
Den Dämpfungskoeffizienten zu bestimmen ist nicht ganz einfach, da sich die Reibung deines Prüfstands zwar in gewissen Grenzen durch viskose Reibung abbilden lassen wird, tatsächlich wird da aber auch noch trockene Reibung sein und wenn man Pech hat auch noch andere, ganz hässliche Effekte. Da musst Du einfach ein bisschen experimentieren.
| Beschreibung: |
| Ein PT1-Glied mit sprunghaft veränderlicher Zeitkonstante |
|
Download |
| Dateiname: |
PT1_Glied.png |
| Dateigröße: |
52.72 KB |
| Heruntergeladen: |
1128 mal |
|
|
|
|
| Romik79 |
Themenstarter
Forum-Anfänger
|
|
Beiträge: 21
|
|
|
|
Anmeldedatum: 06.08.14
|
|
|
|
Wohnort: Dortmund
|
|
|
|
Version: ---
|
|
|
|
|
|
|
Verfasst am: 10.08.2014, 14:25
Titel:
|
|
Du hast natürlich vollkommen recht, mit der Reibung und Dämpfung! Ich Dumpfbacke habe während der Entwicklung des Modells das Lastmoment langsam in das Reibmoment umgewandelt. Und habe vergessen das zu erwähnen.
Also was die Messung am Prüfstand betrifft: Ich habe sie zuerst ohne Belastung durchgeführt. Leerlaufversuch. Das ist das Bild, was ich weiter oben hoch geladen habe.
Ich werde es gleich ausprobieren, was du mir empfohlen hast.
|
|
|
|
| Romik79 |
Themenstarter
Forum-Anfänger
|
|
Beiträge: 21
|
|
|
|
Anmeldedatum: 06.08.14
|
|
|
|
Wohnort: Dortmund
|
|
|
|
Version: ---
|
|
|
|
|
|
|
Verfasst am: 10.08.2014, 14:52
Titel:
|
|
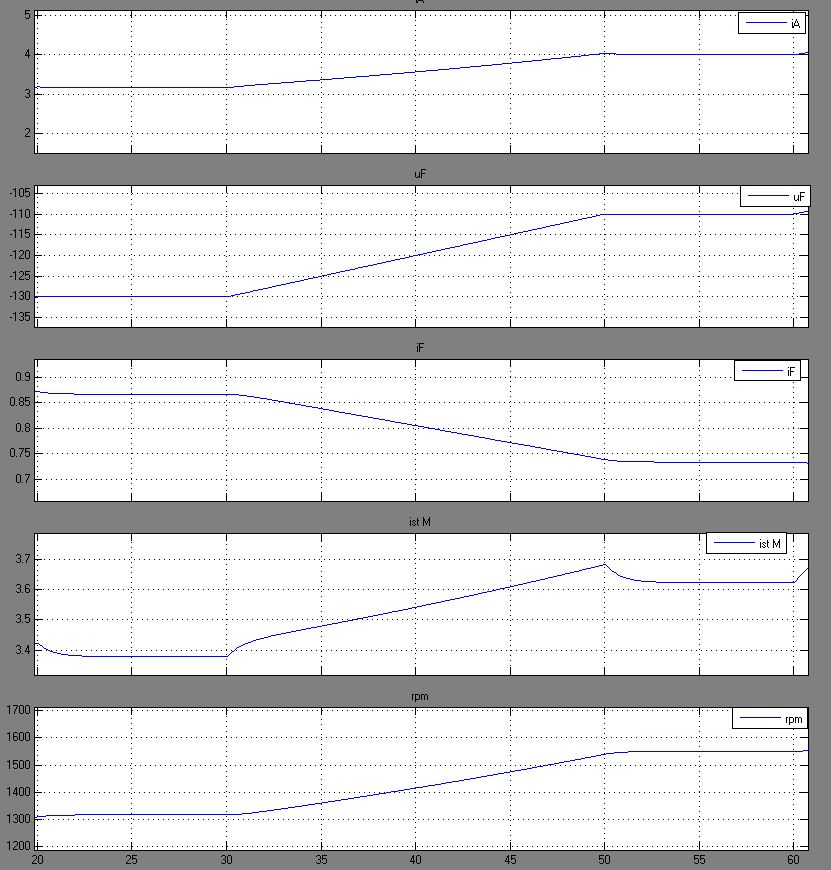
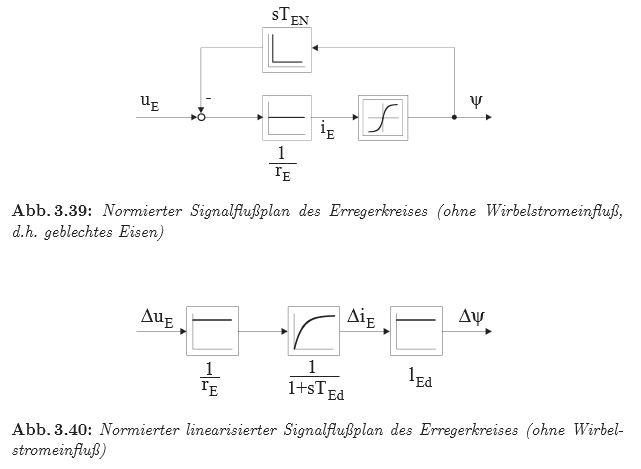
so sieht jetzt mein Modell ohne Lastmoment aus.
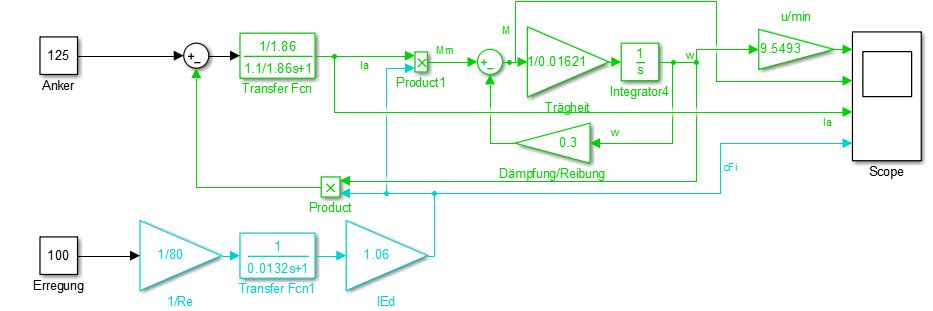
Und so die Ergebnisse. Was die Drehzahl angeht, ist es auf jeden Fall jetzt ähnlicher der realen Messung.
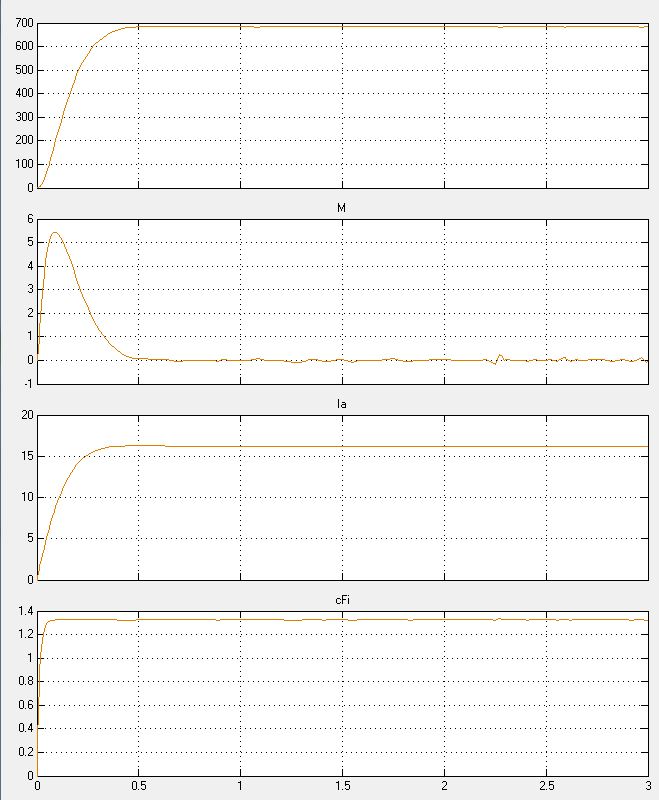
Mir gefallen hier 3 Dinge nicht: Das Reibmoment und der Fluss sind unruhig. Und der Ankerstrom Ia fällt nach dem Hochfahren nicht.
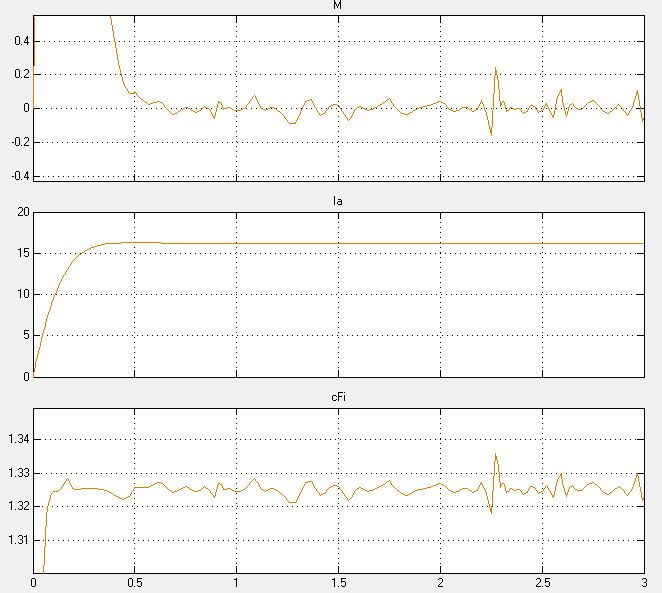
Es stimmt was mit dem Modell nicht. Ich denke ich habe den Erregerkreis falsch aufgebaut.
| Beschreibung: |
|
Download |
| Dateiname: |
scope4.JPG |
| Dateigröße: |
69.41 KB |
| Heruntergeladen: |
1174 mal |
| Beschreibung: |
|
Download |
| Dateiname: |
scope3.JPG |
| Dateigröße: |
98.91 KB |
| Heruntergeladen: |
1164 mal |
| Beschreibung: |
|
Download |
| Dateiname: |
model.JPG |
| Dateigröße: |
41.23 KB |
| Heruntergeladen: |
1174 mal |
|
|
|
|


|
Gehe zu Seite 1, 2, 3 Weiter
|
|
Einstellungen und Berechtigungen
|
|
Du kannst Beiträge in dieses Forum schreiben.
Du kannst auf Beiträge in diesem Forum antworten.
Du kannst deine Beiträge in diesem Forum nicht bearbeiten.
Du kannst deine Beiträge in diesem Forum nicht löschen.
Du kannst an Umfragen in diesem Forum nicht mitmachen.
Du kannst Dateien in diesem Forum posten
Du kannst Dateien in diesem Forum herunterladen
|
|
Impressum
| Nutzungsbedingungen
| Datenschutz
| FAQ
|  RSS RSS
Hosted by:

Copyright © 2007 - 2026
goMatlab.de | Dies ist keine offizielle Website der Firma The Mathworks
MATLAB, Simulink, Stateflow, Handle Graphics, Real-Time Workshop, SimBiology, SimHydraulics, SimEvents, and xPC TargetBox are registered trademarks and The MathWorks, the L-shaped membrane logo, and Embedded MATLAB are trademarks of The MathWorks, Inc.
|
|



